
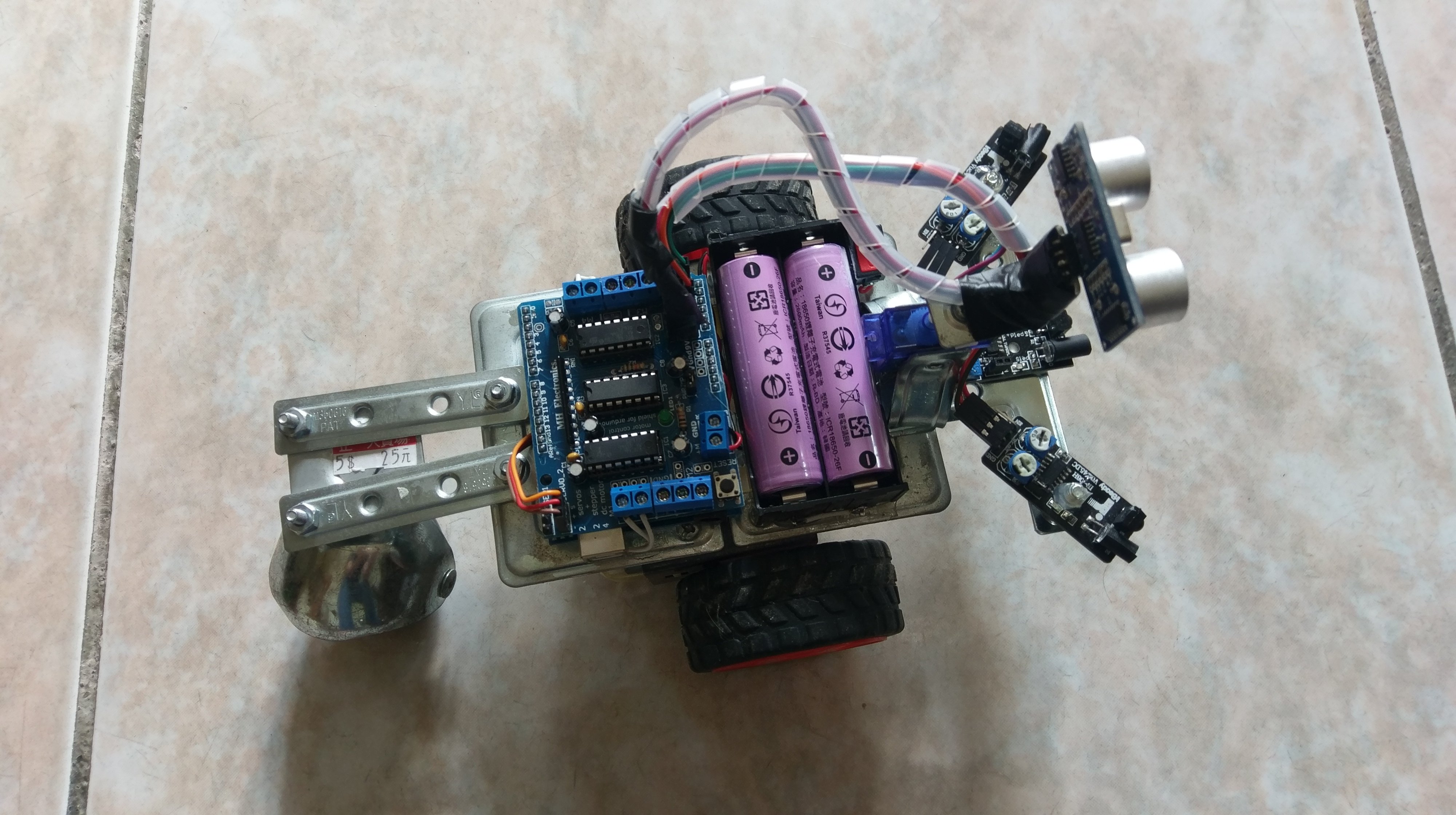
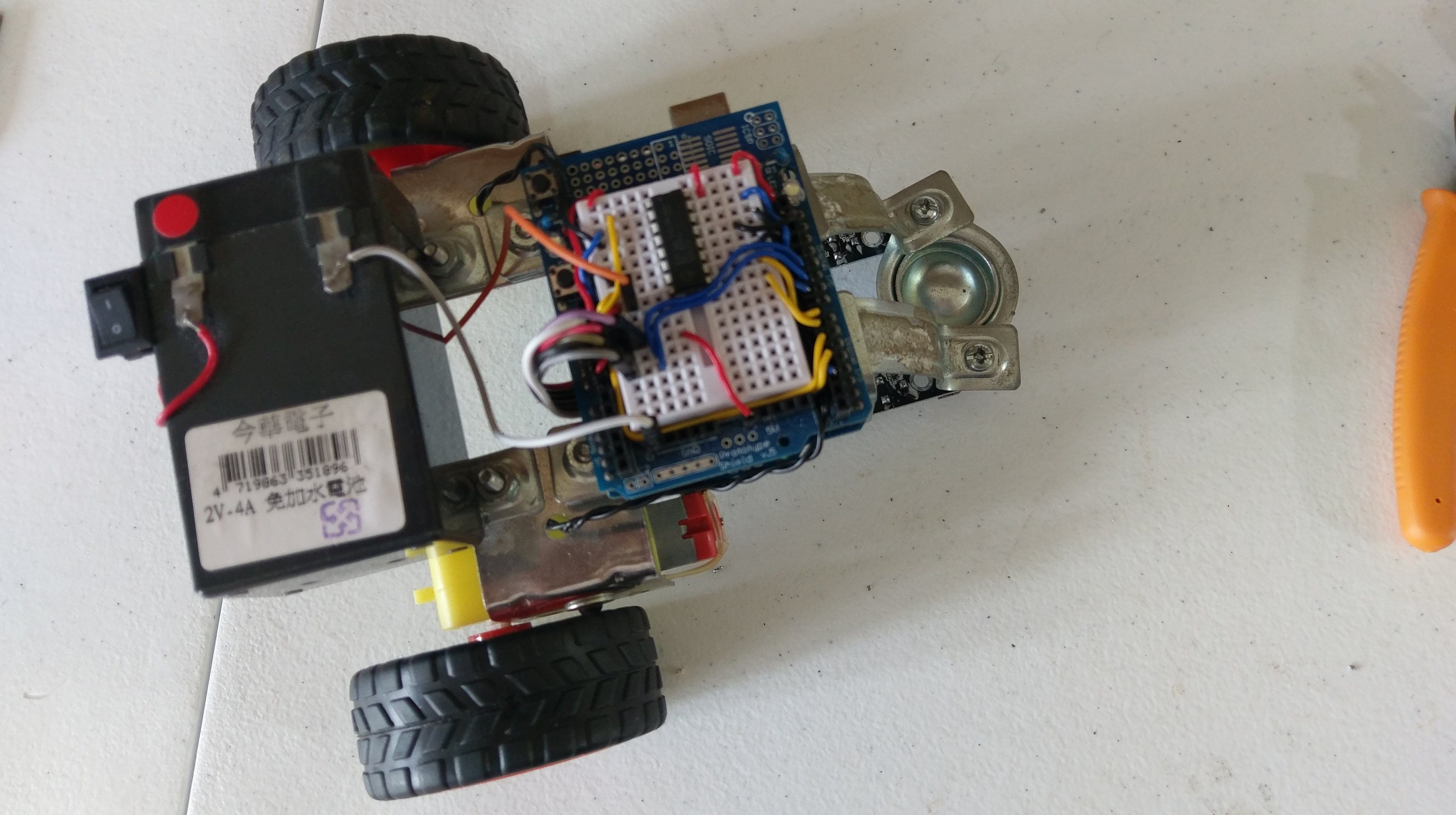
This was my first Arduino project. As you probably can see from the photos, I still needed to learn a lot of things about building robots at that time. For instance, the lead acid battery I chose was the wrong kind of battery for Arduino and also too heavy. Anyway it worked and made me and the cat happy. The final model uses a combination of Ultra sound and Infra red sensors to avoid obstacles.
In this post I’ll discuss the different ways to go about building an obstacle avoiding bot. We’ll look at the merits of using bumper switches, ultrasonic or infra red sensors, or even a combination of sensors. I ran into some trouble with false readings from the ultrasonic sensor and eventually fixed it by using another library called NewPing and the average of 5 pings. Another thing to consider is the avoidance algorithm, which could actually be quite simple, while still effective.
Practical applications for this type of project include making an automatic vacuum cleaner or a roaming security bot.
Here is a video of one of the early prototypes and the cat:


{kind=link}
{kind=link}