

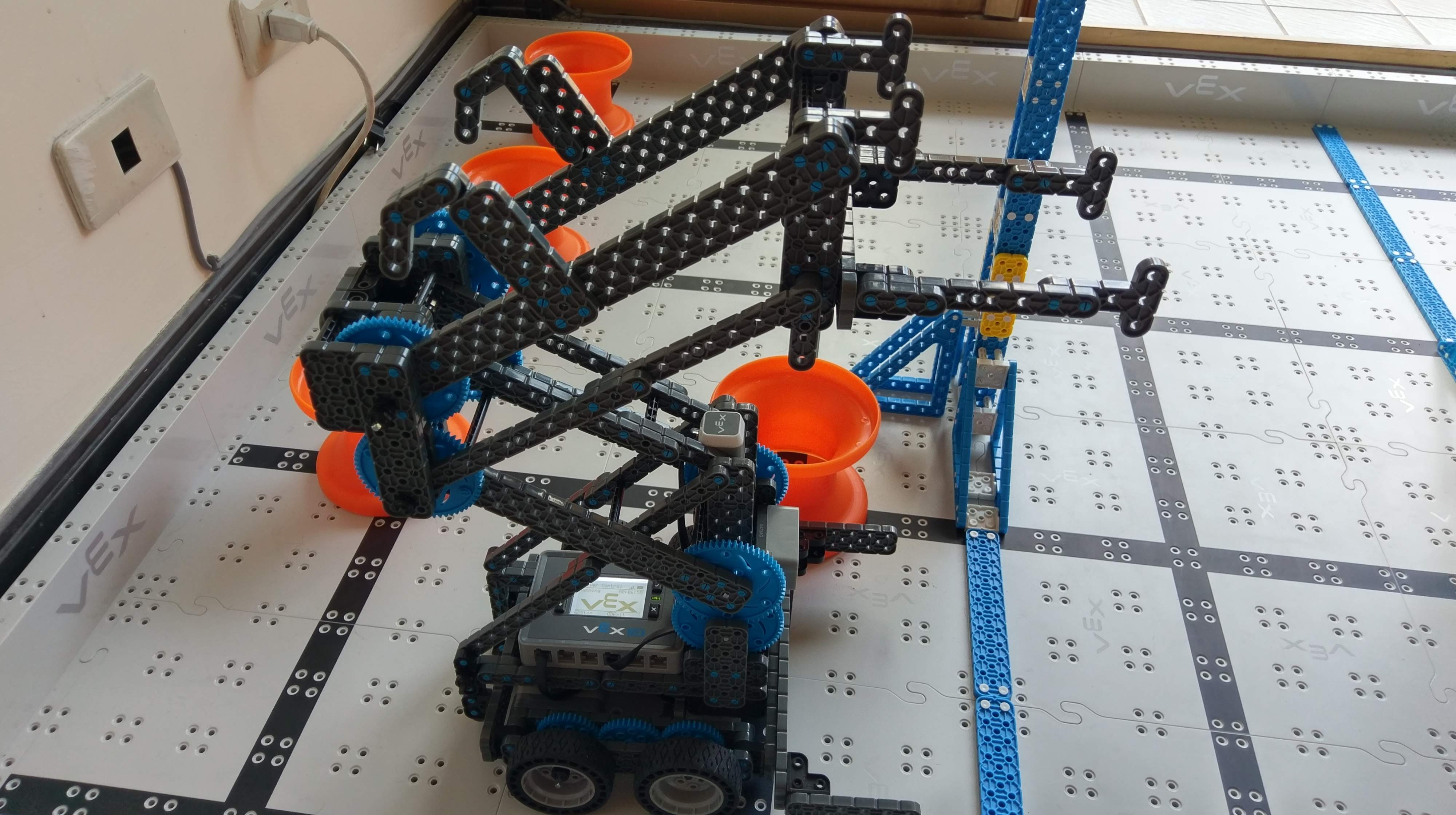
After trying to auto stack with the 4BDR design, we decided that it was too difficult to get the bonus hubs with that robot. (It was a very nice design though). I saw a YouTube video of another auto- stacker, which led to this design. No fancy four bar lift, but a very neat stacking system.
The video I saw did the stacking at it’s rear end, but we wondered if it wasn’t perhaps better to stack directly in front – The jury is still out on that one.
It took some time to perfect the landing of the hub we wanted to stack, here is one of the failed attempts:
But eventually it worked out and it stacks with minimum effort now.
Right, my son was the driver this time, he could get faster with more practice, but at least he is much faster than me! We also show the robot hanging high this time.
This is still a work in progress, so keep an eye out for improvements to the design, it will be posted here.
Coming soon
Starting to program for the autonomous challenge…





{kind=link}
{kind=link}
{kind=link}